1.5. Examples
Since the dVRK is the sum of parts assembled based on each site’s hardware and research applications, all the kits are set up differently. This section shows a few illustrative examples.
dVRK Classic original kit at Johns Hopkins. Intuitive provided the PSMs, MTMs, HRSV, foot pedals and endoscope. Frame and head sensor are custom. Arms are controlled using the dVRK controllers and software.
Full da Vinci Classic at Johns Hopkins. This is a full system, previously used with the Intuitive controllers. All arms, SUJ, foot pedals, head sensor, height adjustment and videos are using the dVRK controllers and software stack. HRSV has been upgraded with flat panels.
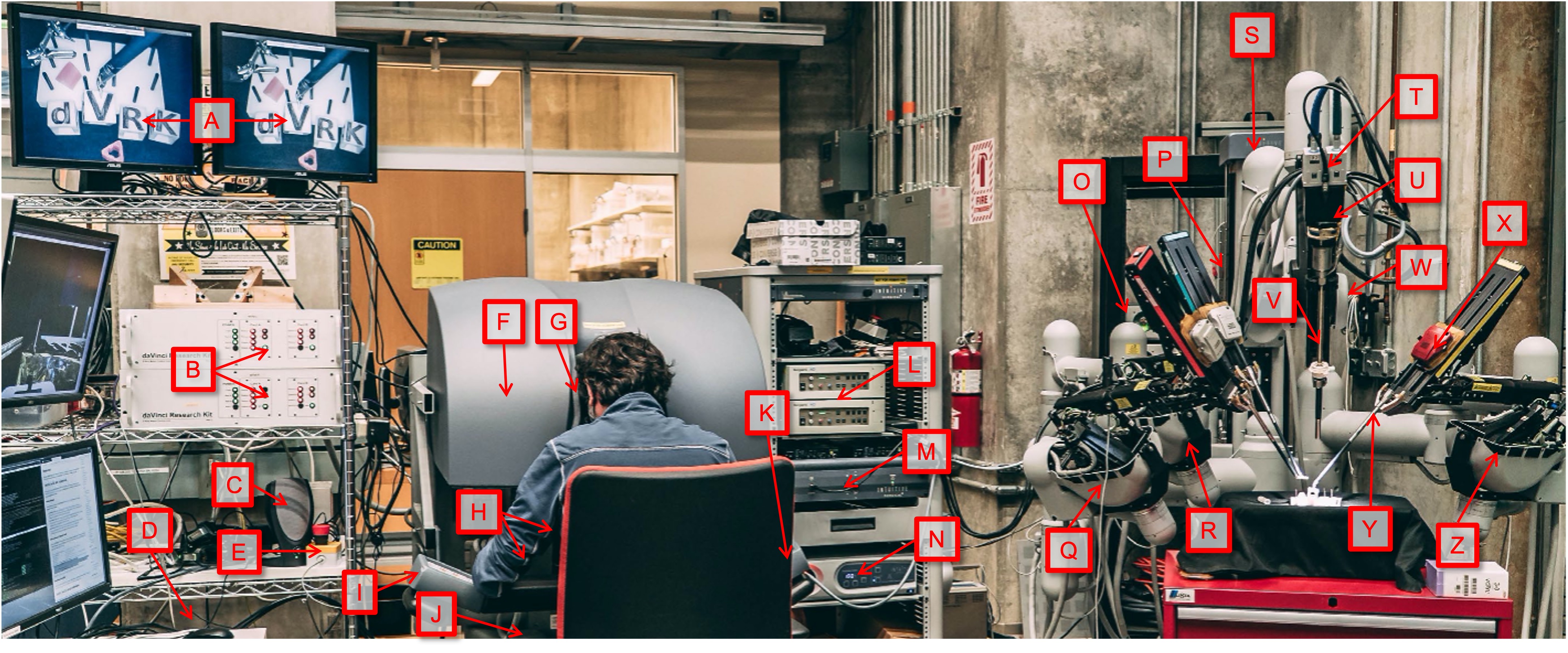
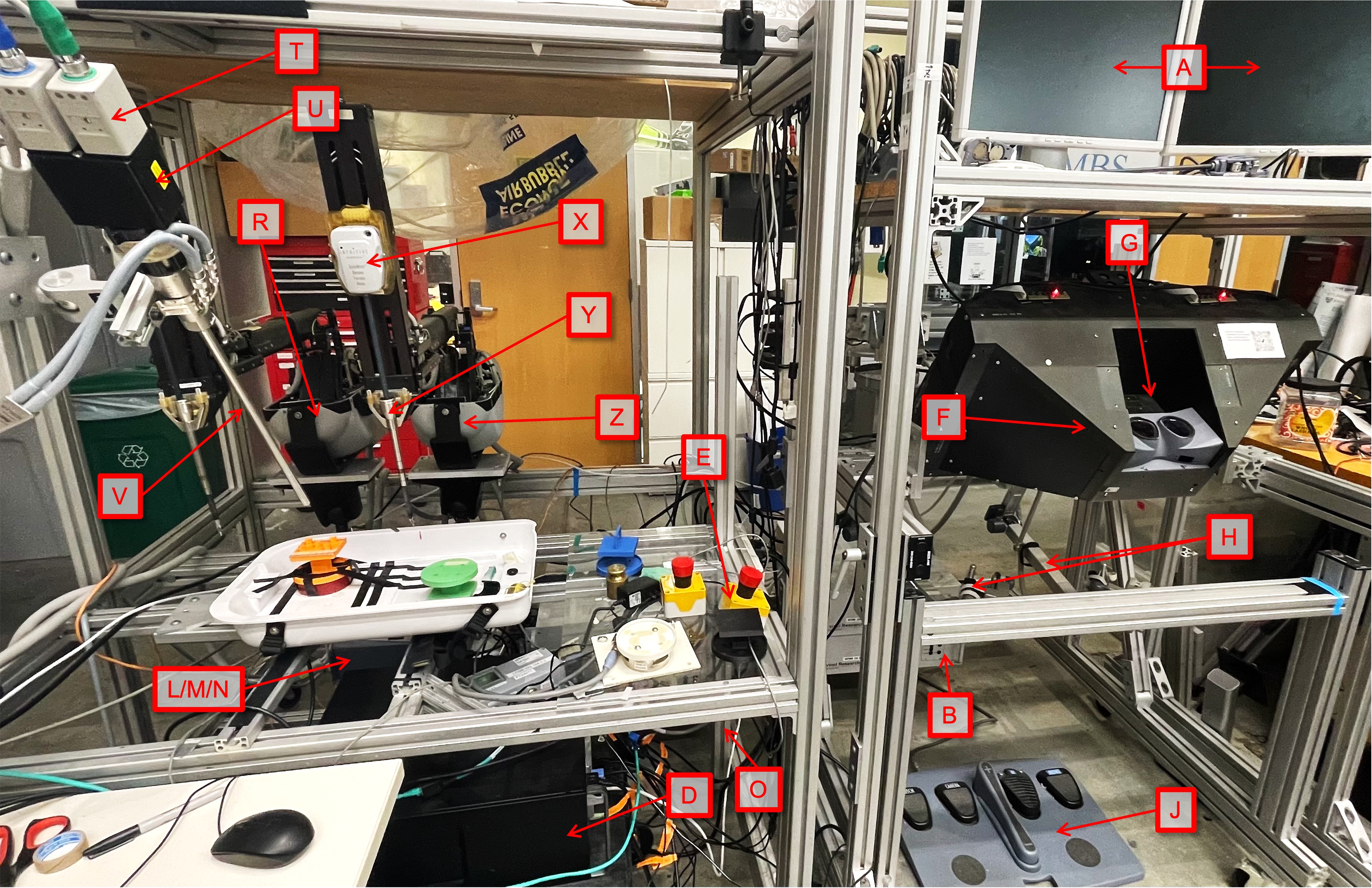
Si patient cart with Classic MTMs at Johns Hopkins. This is a full system previously used with the Intuitive controllers. All arms, SUJ, foot pedals, height adjustment and videos are controlled by the dVRK controllers and software stack. The HRSV is replaced by an HMD (Goovis).

A: External display to show images displayed in HRSV (F). See acronyms.
B: dVRK controllers for the MTMs (H). See Classic controllers.
C: PC Speakers used for audio feedback.
D: PC for the dVRK software and video pipeline. See computers, software and video pipeline.
E: Emergency stop. See e-stop.
F: Stereo display for the surgeon. See HRSV
G: Head sensor to detect operator. See head sensor.
H: MTMs under the console, not visible.
I: Console height adjustment original buttons. See console.
J: Foot pedals under the console. See pedals.
K: Console height adjustment dVRK hack. See console.
L: Endoscopic camera control units. See S camera and Si camera.
M: Endoscopic camera focus controllers. See focus controller.
N: Light source.
O: dVRK controllers for ECM (W) and PSMs (Q, R, Z). See Classic controllers and Si controllers.
P: dVRK Setup Joints controller.
Q: PSM3.
R: PSM2.
S: Setup Joints.
T: Stereo Camera Sensors. See video sources.
U: Mechanical focus controller.
V: Endoscope.
W: ECM.
X: Instrument and instrument sterile adapter
Y: PSM cannula and cannula holder
Z: PSM1.