2.2.3. Classic SUJ
2.2.3.1. Introduction
The dVRK Classic SUJ controllers are similar to the dVRK Classic controllers. They are build around a single QLA/FPGA stack (using a FPGA V1 or V2) and a special board to interface with the SUJ arms, the dSIB (da Vinci SUJ Interface Board). Each controller has 4 156-pin connectors Cannon ITT, one for each SUJ arm. A single dVRK SUJ controller is required per patient cart.
The dVRK SUJ controller supports all the features available on the da Vinci Classic patient cart, i.e.:
Read joint positions. The dVRK QLA has 4 analog to digital inputs, so it reads the potentiometer values sequentially using a multiplexer on the dSIB.
Release brakes. The dVRK controller uses the linear amps of the QLA dedicated to motor control to release the brakes.
Lift PSM3. The dVRK FPGA generates a PWM signal sent to the PWM power unit included on the dSIB.
Read the brake/clutch buttons on the SUJ-PSM1 and SUJ-PSM2. The brake buttons on the active arms themselves are handled by each active arm’s controller, not the SUJ controller (see Classic SUJ)
See also controller versions.
2.2.3.2. Exterior
Connectors
One AC power connector, with on/off switch
Four 156-pin connector ITT Cannon (for the MTM, PSM, or ECM)
Two FireWire connectors
One Ethernet connectors
One 4-pin and one 5-pin safety chain connector; see E-Stop
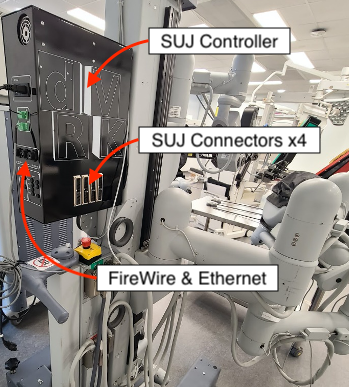
Classic SUJ controller
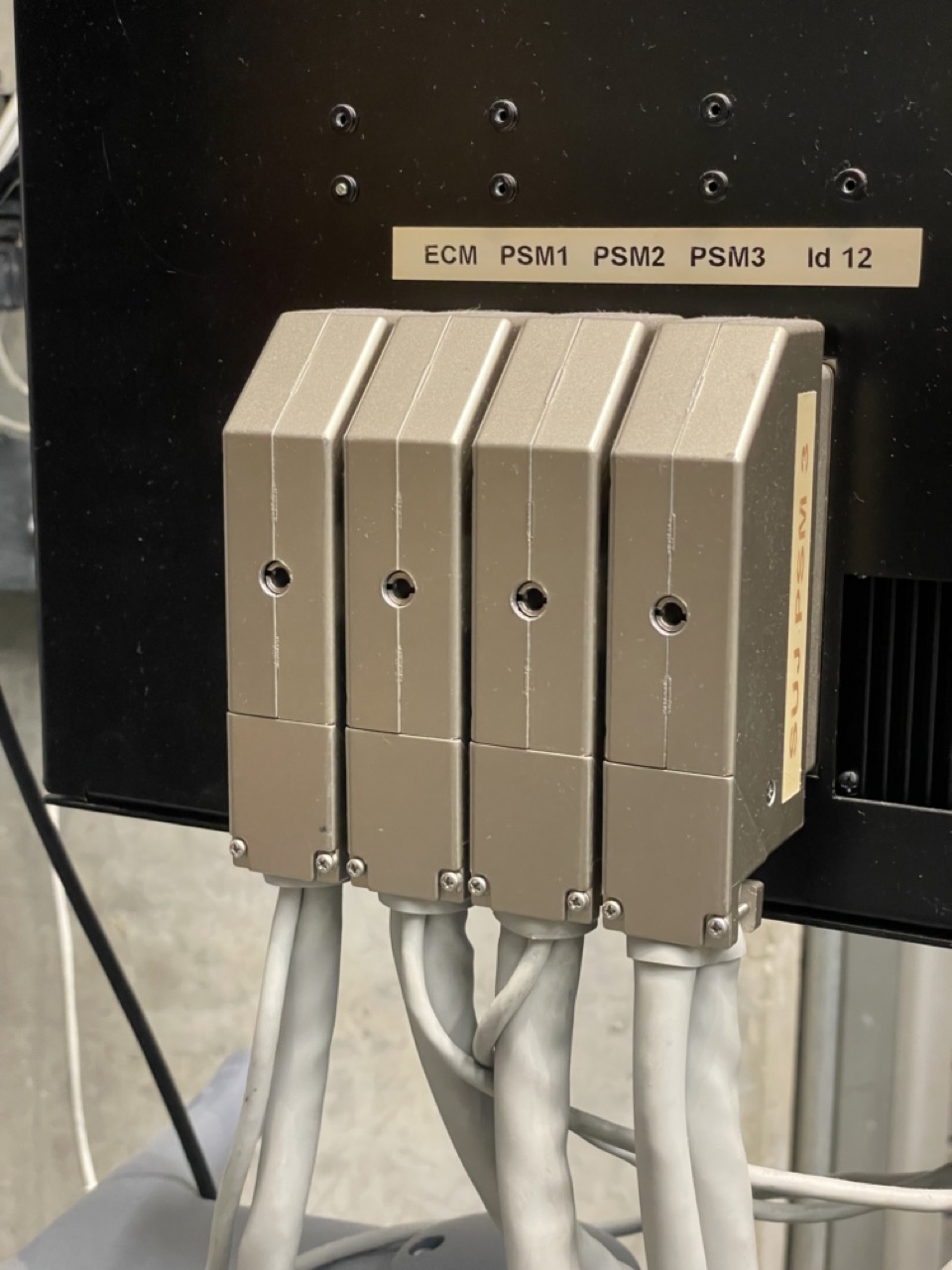
Classic SUJ controller arm connections
LEDs
The LEDs are based on the Classic controllers; see dVRK Classic controllers
2.2.3.3. Internal layout
Internally, each controller box contains one FPGA/QLA board set, one dSIB (da Vinci SUJ Interface Board), LED boards and 2 power supplies:
12V (50W) logic power supply that provides power to the FPGA board
Brake power supply connected to the QLA (48V) with built-in safety-relay.
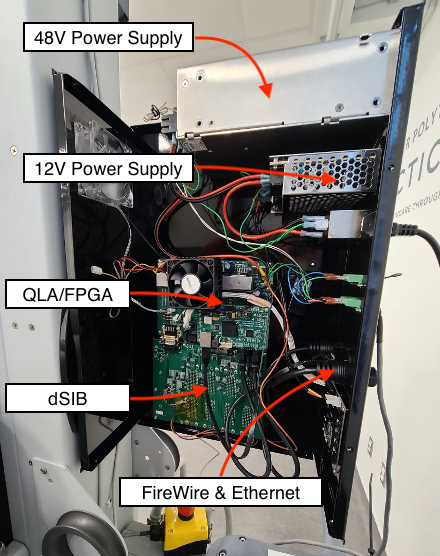
Classic SUJ controller internals
The dSIB has been designed to plug directly into the QLA board (SCSI and D-sub connectors). This reduces the amount of cabling inside the controller.
2.2.3.4. Components
Custom boards (PCBs)
Component versions by build/date.
The FPGA and QLA designs are open source and available on GitHub: https://jhu-cisst.github.io/mechatronics.
The dSIB is provided by Intuitive Surgical. The design, including schematics and BOM, are available on GitHub: https://github.com/jhu-dvrk/dvrk-pcb-dSIB
Power supplies
All boxes contain a 12V (50W) logic power supply that provides power to the FPGA board.
Each box also contains one motor supply (48V) connected to the QLA:
Hardware modifications
QLAs:
Details of components and assembly
This information is stored in a separate GitHub repository: https://github.com/jhu-dvrk/dVRK-Classic-SUJ-Controller