13.6. Related systems
Warning
In no specific order, not endorsed, likely incomplete, incorrect and outdated!
13.6.1. Commercial
13.6.1.1. RAMIS
Intuitive: da Vinci
https://www.intuitive.com/en-us/products-and-services/da-vinci
Location: California, USA
Type: RAMIS, teleoperated
Medtronic: Hugo RAS
https://www.medtronic.com/covidien/en-au/robotic-assisted-surgery/hugo-ras-system.html
https://www.linkedin.com/showcase/medtronic-robotic-assisted-surgery
Location: USA
Type: RAMIS, teleoperated
Notes: Wheeled separate patient side manipulators, physical RCM. Surgeon’s side controllers similar to da Vinci (7-dofs, cartesian), flat panel display

Source: Medtronic
Medicaroid: Hinotori
Location: Kobe, Japan
Type: RAMIS, teleoperated
Notes: Four patient side manipulators, software RCM, mounted on single serial robot for positioning. Surgeon’s side with fixed stereo display (ala HMD), two 7-dofs haptic arms (similar to da Vinci)
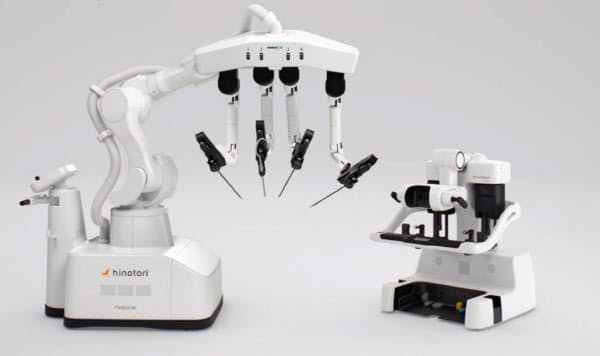
Source: Medicaroid
CMR Surgical: Versius
Location: Cambridge, UK
Type: RAMIS, teleoperated
Notes: Wheeled separate patient side manipulators, software RCM. Surgeon’s side controllers in cartesian space, flat panel display and stereo glasses

Source: CMR
SSII: Mantra
Location: Gurugram, Haryana, India
Type: RAMIS, teleoperated
Notes: Up to 5 patient side manipulators on separate wheeled-cart, physical RCM. Surgeon’s side with 3D flat panel and glasses, 7-dof haptic arms?

Source: SSI Mantra (linkedin)
Cornerstone Robotics: Sentire
https://www.linkedin.com/company/cornerstone-robotics-limited/
Location: Hong Kong
Type: RAMIS, teleoperated
Notes: Similar to da Vinci X
Moon surgical: Maestro
Location: Paris, France/ San Carlos, California, USA
Type: RAMIS, collaborative control (and autonomous)
Notes: ScoPilot (similar to AESOP) assistant holding endoscope for manual surgery

Source: Moon Surgical
Revolve Surgical: R1
Type: RAMIS, collaborative control
Wristed instruments held by mechanical RCMs. Surgeon holds the instruments using wristed handle
Source: Revolve Surgical
Vicarious Surgical Inc
Location: Waltham, Massachussets, USA
Type: RAMIS, teleoperated
Notes: Surgeon’s side controllers in cartesian space (off-the-shelf ForceDimension?), flat panel display. Patient side single port, two manipulators, folded stereo camera
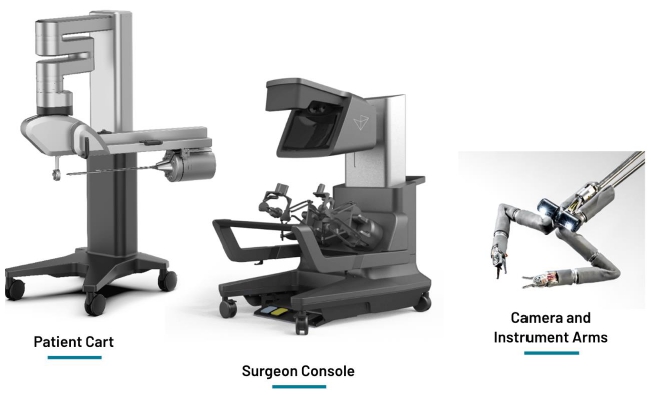
Source: Annual Report 2023 Form 10-K (NYSE:RBOT)
Asensus Surgical: Senhance, LUNA
Location: Durham, North Carolina, USA
Type: RAMIS, teleoperated
Notes: Wheeled separate patient side manipulators, software RCM. Senhance had surgeon’s side manipulator emulate laparoscopic instruments (not cartesian). LUNA seems use free hand system (optical or magnetic tracking?), flat panel display
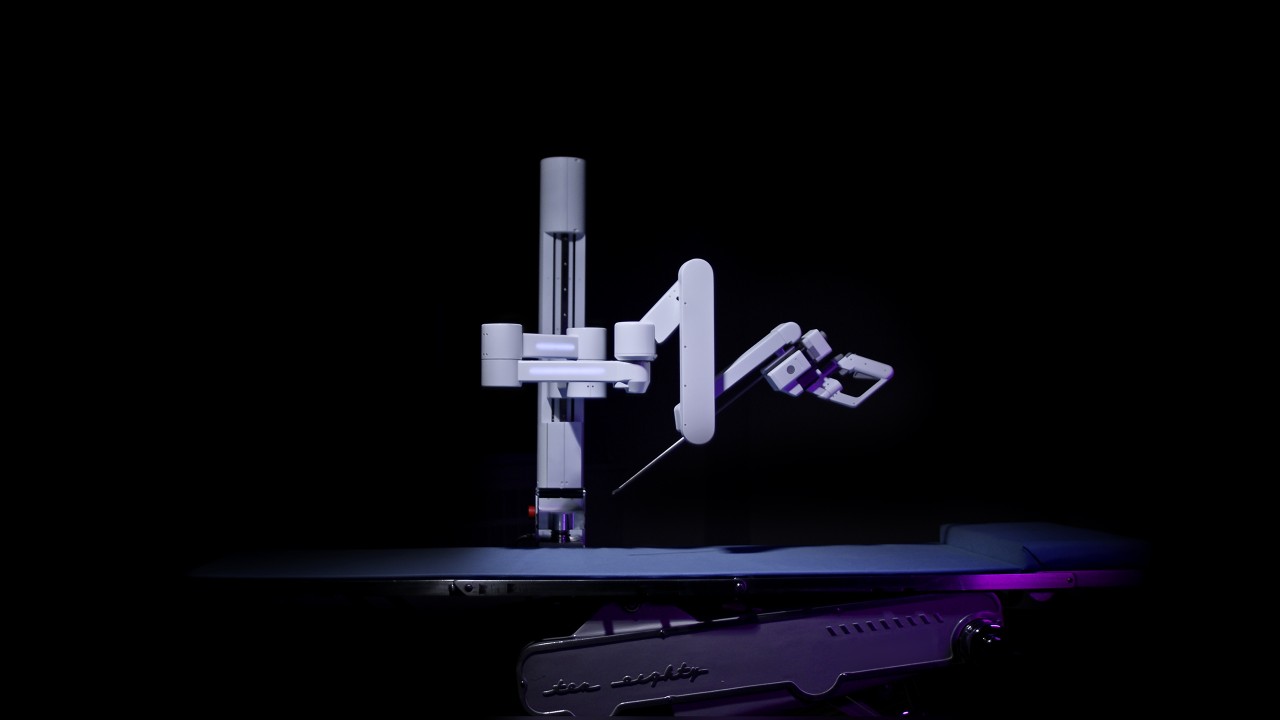
Titan Medical: Enos
Location: Toronto, Ontario, Canada
Type: RAMIS
Notes: Surgeon’s side controllers in cartesian space (off-the-shelf ForceDimension?), flat panel display. Patient side single port, two manipulators, articulated stereo camera

Johnson & Johnson MedTech: Ottava
Type: RAMIS, teleoperated
Notes: Table-mounted separate patient side serial manipulators, software RCM Based on snapshots, stereo display with eye piece (ala da Vinci)
Virtuoso Surgical: Virtuoso
Location: Nashville, Tennessee, USA
Type: RAMIS, teleoperated
Notes: Patient side single port, concentric tubes, mono camera. Surgeon’s side manipulator emulate laparoscopic instruments (not cartesian)

Source: Virtuoso
Rob Surgical: Bitrack
Barcelona, Spain
RAMIS, teleoperated
Notes: up to four patient manipulators, software RCM, uses off-the-shelf instruments (no articulated wrist?). Surgeon’s side use 2 haptic devices and flat panel display

Source: Rob Surgical
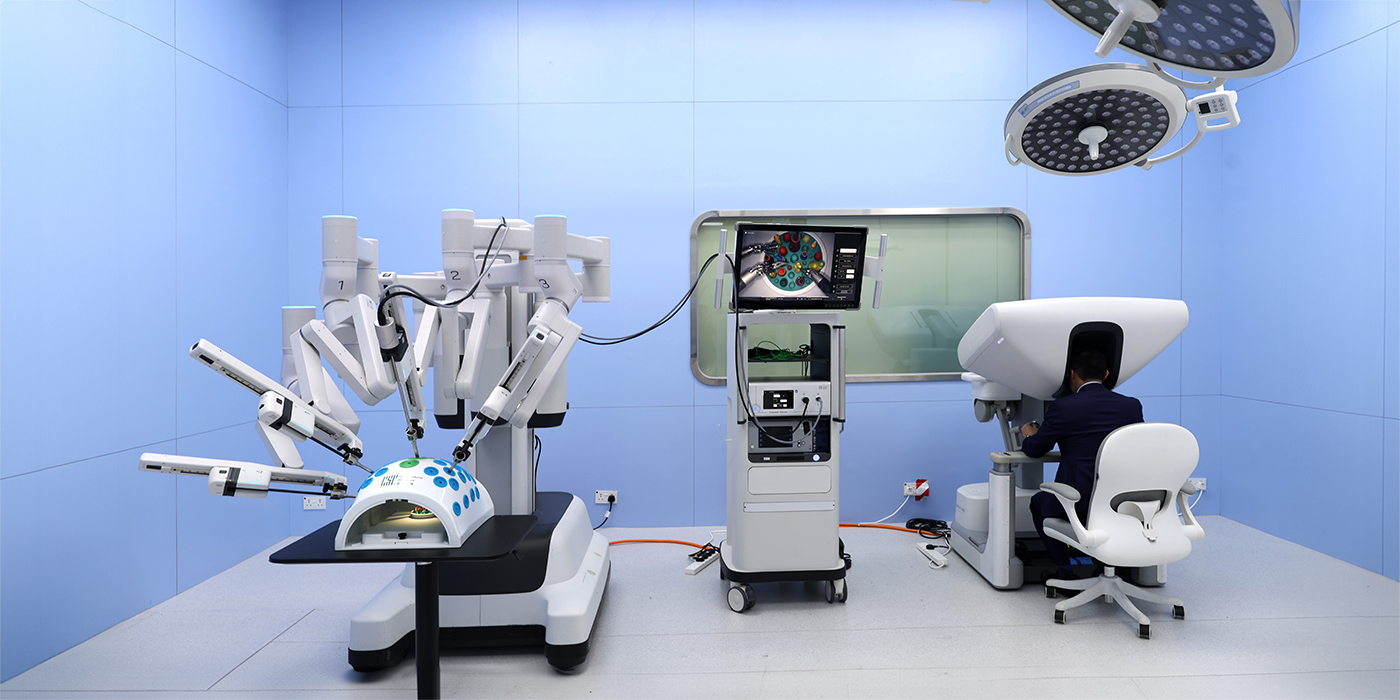
Revo Surgical: Revo-i
Seoul, South Korea
RAMIS, teleoperated
Notes: similar to da Vinci Si

Source: Revo Surgical
13.6.1.2. Simulation
Surgical Science: FlexVR
Location: Göteborg, Sweden
Type: RAMIS simulator
13.6.1.3. Haptic systems
ForceDimension: Sigma, Omega
Location: Switzerland
Types: haptic devices using parallel platform for position, gripper is motorized, up to 7 dofs motorized

Source: Force Dimension
Haption: Virtuoso
Location: France
Types: haptic devices using serial arm, up to 6 dofs motorized
Source: Haption
Quanser: HD2
https://www.quanser.com/products/hd2-high-definition-haptic-device
Location: Ontario, Canada

Source: Quanser
13.6.1.4. Bronchoscopy
Noah Medical: Galaxy
Location: California, USA
Type: flexible robot, used with C-Arm/CBCT
Intuitive: Ion
https://www.intuitive.com/en-us/products-and-services/da-vinci
Location: California, USA
Type: flexible robot, used with C-Arm/CBCT
Johnson & Johnson MedTech: Monarch Quest
Location: New Jersey, USA
Type: flexible robot, used with C-Arm/CBCT
13.6.1.5. Orthopedic
Stryker: Mako
https://www.stryker.com/us/en/joint-replacement/systems/Mako_SmartRobotics_Overview.html
Type: Open orthopedic surgery, knee
Johnson & Johnson: Velys
Type: Open orthopedic surgery, knee/hip
Think Surgical: TMINI
Location: Freemont, California, USA
Type: Open orthopedic surgery, knee
Curexo: Cuvis {joint,spine}
Location: Seoul, South Korea
Type: Open surgery, knee and spine (different robotic systems)
eCential Robotics
Location: Grenoble, France
Type: Open surgery, seems to use Kuka medical arm and optical tracker
13.6.1.6. Other
AcuSurgical: Luca
Location: Montpellier, France
Type: Eye surgery, teleoperated
Notes: 2 patient side manipulators
MMI: Symani
https://www.mmimicro.com/our-technology/symani-surgical-system/
Location: Jacksonville, Florida, USA
Type: Open microsurgery
Notes: 2 patient side manipulators with wrist (7 dofs), direct line of sight, free hand joysticks?
13.6.2. Research systems
RavenII
Type: RAMIS
Notes: Patient side, physical RCM, compatible with da Vinci instruments. Surgeon’s side uses off-the-shelf haptic devices (ForceDimension). No camera nor display
SuPER
Type: RAMIS
Notes: da Vinci S/Si instruments mounted on serial manipulator (Kinova). Surgeon’s side uses off-the-shelf haptic devices (ForceDimension). No camera nor display